ロビにWEBカメラを付けてみる
2014年5月18日
デアゴスティーニの週刊ロビですが材質に不具合があり頭の部分が再配布されました。
余ったパーツで何か作れないか考えてみました。
ロビは目に付けた人感センサーで人間を感知するようです。
カメラではありませんがどれくらいの精度で認識できるか楽しみです。
今までもロボゼロでもWEBカメラやandroid端末を使っていろいろやっています。
ロボゼロをコンピュータ制御してみる その2
ロボゼロをコンピュータ制御してみる その6
まずロビの頭に組込めそうなWEBカメラを探しました。
UCAM-DLA200HSV
長さが短いので頭に収まりそうです。
ただ現物を合わせてみないとちゃんと納まるか分からないのでダメモトで最安のものを購入してみました。
送料込みで999円で購入する事ができました。
ただ普通郵便だったので到着するのに3日かかってしまいました。
まぁこの価格だった仕方がありませんが。
ロビの目の大きさと口径が同じくらいなので目の位置に取り付たかったのですが構造上無理があります。
頭の上の部分が空いているのでそこに取り付ける事にしました。
ロビのおでこの位置に穴が開いているのでそのまま付けたのですが小さすぎてまともな視野が得られませんでした。
この穴をカメラの口径くらいに広げます。


スタンドですが簡単に外れると思っていましたが特殊なネジが使われていたため結構手間がかかりました。
外したスタンドのビス穴を使った頭にカメラを固定しました。


下側が少しケラれますが機能には影響しないと思います。

ロビのサーボはロボゼロのサーボと同じスペックなのでロボゼロの時の同じ接続方法で動作します。
パソコンとの接続については下記の記事を参照してください。
上半身だけのロボゼロで遊んでみる
ロビと遊んでみる その1
今回はNATOC Nゲージ自動列車運転システムを使って動かしてみます。
NATOCは講談社「SL鉄道模型」の転車台をサポートしています。
転車台もロビのサーボで駆動するようになっているので転車台の機能でロビの頭を動かします。
(画像をクリックすると拡大します)
転車台の回転角を等分で設定します。
右方向は転車台の反転方向で設定します。

転車台操作でカメラを左右にパーンする事ができます。
次にNATOCの動体検出の機能を使ってみます。
NATOCはWEBカメラで車両をとらえてその位置をカメラ画像から検出します。
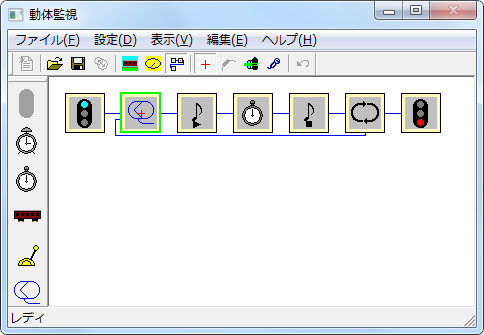
NATOCのプログラムで車両が画面の中央を通過するのを検出します。
次のステップでサウンドを鳴らす命令が定義してあります。
踏切の警報機音を鳴らします。
タイマーで数秒鳴らした後サウンドを止めています。
この動作を数回繰り返えしています。
実際の実行動画です。
今回はスタンドを使った実験でしたがロビの完成後、実際ロビにWEBカメラを付けて制御してみたいと思っています。
目次に戻る