ロビと遊んでみる その3
2013年5月15日
19日改訂
デアゴスティーニの週刊ロビですが前回の頭を動かしたのに続いて右手を動かしてみました。
頭はオリジナルのスタンドで動かす事ができましたが手はスタンドには取り付けないようになっています。
しばらく待てば本体に取り付けられるのでしょうが手も早いとこ動かしたくなったのでスタンドに取り付けてみました。

肩の回転サーボに取り付ける連結金具をスタンドの裏ブタに直接取り付けます。
固定するためビスの穴(2mm)をピンパイスで開けます。
金具を取り付ける位置は実際に金具を裏ブタに当てて右手がちょうどいい位置になるように決めました。


裏ブタには2mmのビスナットで取り付けます。
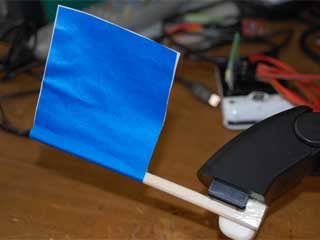
今回ロビと遊ぶのは旗あげゲームです。
たまたま12号の表紙と記事に旗あげゲームが載っていましたが、ロボゼロの時も上半身が完成した時やその他でも何回かやっています。
ロビの指は動かない(まだ指も完全ではありませんが)ので旗は両面テープで手に貼り付けました。
そういえば表紙のロビも旗を持っていますが、握れないはずですがどうやって持っているのでしょう。
サーボはandroid携帯からBluetoothアダプターにコマンドを送信して動かしています。
Bluetoothアダプターのにコマンドを送信して動かしています。
Bluetoothアダプターの接続方法についてはこちらを参照してください。
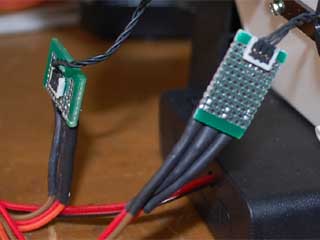
サーボとBluetoothアダプターの配線は前回の配線に対して右手のサーボケーブルを前回作製したものと同じコネクターをもう一つ作り接続します。
今回のサーボケーブルは頭のサーボケーブルと並列につないでBluetoothアダプターに接続します。
サーボを制御するアプリは前回の物を流用しました。
今までサーボはシングルパケットでひとつづつ動かしていましたが今回は折角なのでロングパケットを使ってディジーチェーンでつながれた肘のサーボと肩のサーボを一度に動かしてみました。
ロングパケットは同じ命令を複数のサーボに同時に送信して動かす事ができます。
データ(角度)はサーボ毎に定義できるので違った角度に動かす事ができます。
それぞれのサーボの角度は旗を上げる場合は、肘(サーボID=18)が0°、肩(サーボID=17)が-50°で旗を下げる場合は、肘が60°、肩が0°で動かしています。
プログラムの実行動画です。
音声認識ですが前回のように単語で命令する場合、ほぼ完全に認識できたのですが今回は旗の種類と動作の組み合わせなので正しく認識されない事もありました。
両手が揃った所でもう少し複雑な動きができるようにしたいと思います。
なおオリジナルのロビのスタンドには手は付きませんので今回のような改造を行う場合は、自己責任という事でお願いします。
サーボをディジーチェーンでつなだ後、付属のサーボテスターで接続確認しようとしたところちゃんと動作しませんでした。
サーボテスターのTESTボタンを押すとつながれているサーボに対してサーボIDを返すように要求コマンドを出していますが複数のサーボIDだとうまく読み取れずにエラーにしているようです。
サーボの開発元によると本体に組み込んだ状態でサーボテスターを動かすと本体の稼働範囲を越えてサーボが動いてしまいサーボに悪影響を与えるので複数のサーボのテストは考慮していないという事です。
確かに今回の肘のサーボはマイナス側には動かせないのでサーボテスターは稼働範囲を越えて動かそうとします。
しかしディジーチェーンでつながれたものはコントローラーが配布されてからのチェックとなると思いましたが、その時接続不良が見つかると分解しなくてはいけないのでかなり厄介な事になると思います。
サーボは動かさないにしてもLEDの点滅等で接続を確認する機能がサーボテスターにあってもよさそうなんですが・・・
現状のテストボードでディジーチェーンの接続をチェックする方法を考えてみました。(接続確認テストではなく接続不良確認テストという事ですが)
2個つないだ状態でTESTボタンで動かしてみてテストボード側のサーボだけが動いたらその先のサーボとはつながっていないという事になります。(もちろん各サーボのケーブルは単体の接続試験で確認済み)
接続OKなら同様に3個目をつないで動かなければOKという事になります。(100%ではありませんが)
ただし稼働範囲に注意する必要があります。(接続OKの場合動かないので接続不良の場合のみ)
また上記のテストボードの使い方は、本来の使用方法とは異なりますので自己責任という事でお願いします。
ロボゼロのサーボテスターでディジーチェーンの接続をチェックできる事を確認しました。
ロボゼロのサーボテスターはPWM方式で動かしているのでコマンド方式で動かすロビのサーボテスターと違ってサーボに設定されているサーボIDに関係なくサーボを動かす事ができます。
ただしロビのサーボケーブルはそのままロボゼロのサーボテスターにつなげないのでこちらやこちらのサイトのような変換ケーブルが必要です。
またロボゼロのサーボテスターは最初はゆっくり動きますがその後、手の稼働範囲を越えて激しく動くのでその前にサーボテスターの電源をOFFにする必要があります。
なおロボゼロのサーボテスターはロビのサーボをテストするように設計されていませんのでご使用は自己責任という事でお願いします。
目次に戻る