ロビの下半身を動かしてみる
2014年2月24日
デアゴスティーニの週刊ロビですがバラバラに各パーツの組み立て作業が続いていました。
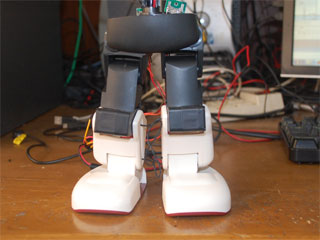
このためこれといった動作をさせる事ができませんでしたが52号で右足と左足が合体したのでこれを使って遊んでみます。
49号でマイコンボードと51号で動作確認用ソフトが提供されました。
しかしマイコンボードの仕様が公開されていないためマイコンボードを使ってロビを制御する事は今の時点でできそうもありません。
そこで今までのようにサーボを直接動かす事にしました。
前回まではBluetoothアダプターを使ってロビの頭や腕をandroid携帯で動かしました。
今回はFT232RLという変換ポートを使ってWindowsパソコンのUSBポートに接続して動かしてみました。
パソコンとサーボの接続はロボゼロをパソコン制御の方法で行いました。
ロビのサーボの接続は旗上げゲームで使ったコネクターをそのまま使っています。
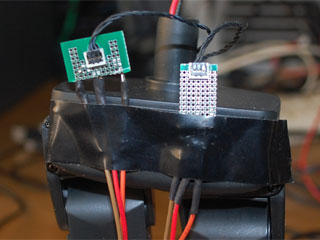

今回はサーボモーターが10個つながっているのでパソコンのUSBの電源だけでは電力不足のようです。
10個全部をトルクオン状態にはできるのですがサーボを動かすと他のサーボのトルクも抜けてしまいました。
そこで安定化電源をつないで5Vの補助電源を供給しました。
サーボを動かすために専用のWindowsプログラムを作成しました。
起動すると自動的に10個のサーボがトルクオン状態にになります。
ホームポジションボタンで各サーボをホームポジョンの位置にします。
左右ボタンで腰を左右に振ります。
開始ボタンで連続して腰を左右に振ります。
その上のスライダーを動かす事によって速度を調整する事ができます。
プログラムの実行動画です。
まず基本動作をプログラムのボタンで動かしてみました。
次の動画はBGMに合わせて動かしてみました。(音楽が流れるので音量に注意してください)
今回は単純な動きしかしていませんが速度をコントロールできるのでBGMのリズムに合わせる事ができました。
なおロビをコントロールボード以外で動かす事による不具合はメーカーでは保障されていません、あくまで自己責任という事でお願いします。
目次に戻る