ロビと遊んでみる その1
2013年4月15日
前回の週刊ロボゼロに引き続いてデアゴスティーニの週刊ロビの作製をしています。
ロボゼロは最終号でやっと本体を動かす事ができましたが、今回は部分的にですが早くも7号で動かす事ができます。
私の場合フライングして途中で動かしてみましたがロボゼロやロビのようなクラフトマガジンは製作過程を楽しむより動かして楽しむ要素が大きいので今回のように途中で動かせるのはいいと思います。
本誌では3号で配布されたテストボードを使って動かします。
なお前回もテストボードは2号で配布されており、これで毎回サーボのチェックを行うようになっていました。
ロビのサーボはロボゼロのサーボと同じスペックで、2通りの動かし方があります。
信号のパルス幅によりサーボの角度を変更して動かす方法とコマンドで動かす方法です。
今回は後者のコマンドによりロビのサーボを動かしてみたいと思います。
BlueToothインタフェイスを介してandroid携帯でコントロールしてみます。
基本的な接続方法はロボゼロでやったこちらの方法で行います。
サーボを制御するためにはサーボとBlueToothインタフェイスを接続する必要があります。
ロボゼロの場合はサーボに直接ケーブルが配線されていて3PINの標準的なコネクターでインタフェイスで接続できました。
ロビのサーボはACHという特殊なコネクターで接続されます。
このコネクターをを使ったケーブルがロビで配布され、それを使ってテストボードやマイコンボードに接続します。
そのケーブルを途中で切断したものを使えば簡単にインタフェイスに接続できます。
しかし今の所ロビのパーツ販売はされておらずロビのバックナンバーを入手するか、既に配布されているケーブルを利用しなければいけません。
現在バックナンバーはデアゴスティーニに在庫がないため入手する事ができません。
そこでボード側のコネクターを入手して接続する事にしました。
BM03B-ACHSS-GAN-TF LF SN
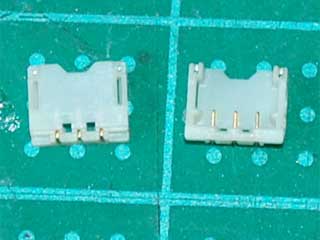
直接基板の表面にハンダ付けするタイプ(表面実装)のようで足が非常に短いです。
これに銅線をハンダ付けしましたが結構難しいです。
熱を加えすぎるとコネクターが溶けて足が抜けてしまうので気を付けなければいけません。
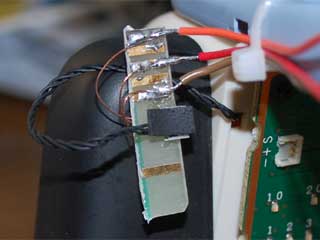
不要になった基板のスロット差し込み部にコネクターを瞬間接着剤で接着しました。
先程ハンダ付けした銅線と標準コネクターのケーブルをハンダ付けして配線しました。
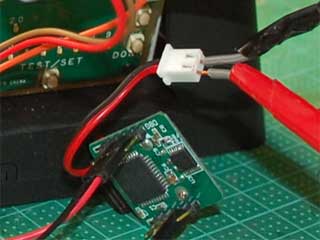
折角なのでバッテリィケースから電源を取っています。
ロビとBlueToothアダプタは以下のように接続しています。
androidで制御プログラムを作成しました。
スマホに「ロビ」と呼びかけるとその方向にロビが振り返るようにします。
スマホがどの方向にあるかはandroid携帯の方位センサーを使いました。
まずスマホを正面でロビに向けてプログラムの「方向設定」ボタンを押してロビの方位をプログラムにセットします。
この位置でロビを呼ぶとロビは正面を向くようになります。
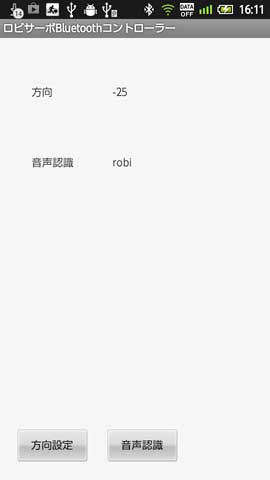
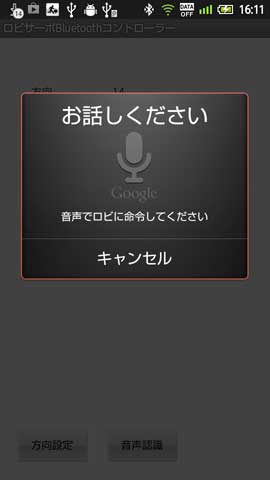
「音声認識」ボタンを押すと右の音声入力ダイアログが表示されるので「ロビ」と呼びます。
androidが認識した言葉を画面に表示します。
プログラムでは「ロビ」、「ろび」または「robi」という文字列が認識した文字に含まれていた場合ロビを動かすようにしています。
プログラムの実行動画です。
最初はロビを向かせる方向を顔認識でやろうと思いましたが携帯をロビ側に置く必要がありこちらから音声認識で呼びかける事ができなくなるので方位センサーで携帯の向きを検出するようにしました。
まだサーボが1個だけなのでただ首を左右に振るだけですがロビがこちらの言葉に反応してくれるので単純な動きでも結構可愛いです。
なお今回のような改造は、ロビ本体への影響を伴いますのであくまでも自己責任という事でお願いします。
目次に戻る