プラロボホンの改造その5
2017年2月21日
今回は音声認識ボードを取り付けてプラロボホンで音声認識をやってみます。
音声認識ボードはマイコンボードよりふたまわり位大きいのでそのままではボティに内蔵するのは難しいと思います。
丁度プラロボホンの背中と同じ大きさなので外付けにします。
まずマイク基板をボディ前パーツに(L3)に取り付けます。
マイク基板には赤外線の送信部も実装されています。
今回赤外線機能は使いませんが取り外すのも面倒でまたロビに戻せなくなるのでこのまま使います。



まずマイク基板の取り付ける位置ですが今回サーボを内蔵しているのでサーボに干渉しない位置に取り付けました。
赤外線送信部とマイクの穴を開け2mmの皿ネジとナットで固定します。
胸パーツ(P3)にも赤外線送信部とマイクの穴を開けます。
胸パーツとボディ前パーツに空間があるのでマイクの穴はもう少し大きい方がいいかも知れません。
角度がある方向からの音声も直進でマイク基板の穴に届くように角度を付けても基板のマイク穴が見えるくらいの大きさにしてください。

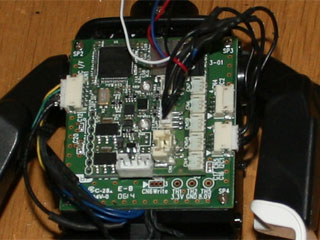
音声認識基板は2mmのビスでボディ後パーツ(B1)に直に取りけます。
裏からナットで留められないので1.5mm程度の穴を開けて2mmネジでタップを切りながら締め付けます。
その上にマイコンボードを重ねる訳ですが音声認識ボードに穴を開けると多層のパターンを切断する恐れがあるので今回は厚めの両面粘着シートを使いました。
最初は音声認識ボードと赤外線ボードを重ねるブラスチック性のポストを音声認識基板な接着してマイコンボードをビス留めしようとしたのですが、ケーブルなどでストレスがかかりすぐに取れてしまうので止めました。
工夫すればもっとスマートな取り付け方法があると思います。
今まで口LED基板からのケーブルを直接マイコンボードに接続していましたが今回はそれを音声認識ボードに接続して、音声認識ボードマイコンボードは別の4線ケーブルで接続します。
実際にプラロボホンを動かした動画です。
なお今回の改造は配線を間違えるとマイコンボードや音声認識ボード等が壊れる事がありますのであくまでも自己責任という事でお願いします。
目次に戻る