儘價偺栚偺僷僞乕儞昞帵
2015擭11寧7擔
丂儘價偄偮傕戝偒側摰偱傑傢傝偺怓傪LED偱曄偊偰姶忣傪昞偟偰偄傑偡丅
丂偙傟偼偡偽傜偟偄愝寁偱傒傫側偑儘價偑壜垽偄偲巚偆傂偲偮偺梫場偩偲巚偄傑偡丅
丂偟偐偟偙偺崟栚偵偄傠偄傠側宍偺栚傪昞帵偝偣偰儘價偺姶忣傪昞偣側偄偐傗偭偰傒傑偟偨丅
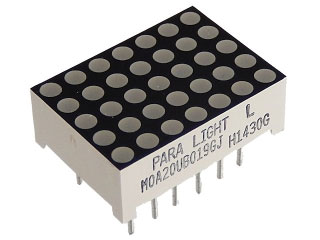
丂巊偆偺偼僪僢僩儅僩儕僢僋僗LED(埲壓DMLED偲婰嵹)偲偄偆LED傪廲墶偵暲傋偨傕偺偱偡丅
丂儘價偺栚偵巇崬傓偵偼嵟戝偱傕廲墶偑20mm埲壓偺暔偱側偗偄偗傑偣傫丅
丂杮摉偼廲墶摨偠偱側傞傋偔僪僢僩悢偺懡偄暔偑偄偄偺偱偡偑埨壙偱偙偺僒僀僘埲壓偺暔偱挷傋偰偙偪傜偺傕偺傪巊偄傑偟偨丅
丂惵怓DMLED 5x7僪僢僩
丂怓堘偄偱埲壓偺傛偆側傕偺傕偁傝傑偡丅
丂愒怓DMLED 5x7僪僢僩
丂偍偦傜偔廲偱悢帤傗傾儖僼傽儀僢僩傪昞偡傕偺偩偲巚偄傑偡偑崱夞偼墶偱巊偄傑偡丅
丂偙偙偱DMLED偺岝傜偣曽傪彮偟愢柧偟偰偍偒傑偡丅(惵怓LED偱愢柧)
丂偙偺応崌廲7屄丄墶5屄偺LED偵懳偟偰傾僲乕僪(亄)偲僇僜乕僪(亅)偑奿巕忬偵攝慄偟偰偁傝傑偡丅
丂偺応崌廲7屄丄墶5屄偺LED偵懳偟偰傾僲乕僪(亄)偲僇僜乕僪(亅)偑奿巕忬偵攝慄偟偰偁傝傑偡丅
丂堦楍栚偺堦斣忋偺LED傪岝傜偣傞偵偼PIN12偵亅丄PIN1偵亄偺揹嬌傪偮側偘傑偡丅
丂偙偆偡傞偙偲偵傛傝LED偺悢偩偗PIN偑偄傞昁梫偼側偔廲悢亄墶悢偡側傢偪12杮偺PIN偱嵪傓傢偗偱偡丅
丂偨偩偙偺曽朄偩偲堦楍栚偺堦斣忋偲擇楍栚偺忋偐傜擇斣栚偺LED偩偗岝傜偣傞偺偼彮偟栵夘偱偡丅
丂側偤側傜偙傟傜偺LED傪岝傜偣傞偵偼PIN12偲PIN11偵亅丄PIN1偲PIN3偵亄偺揹嬌傪偮側偘傞栿偱偡偑偙偆偡傞偲堦楍栚偺忋偐傜擇斣栚偲擇楍栚偺堦斣忋傕岝偭偰偟傑偄傑偡丅
丂偙傟傪旔偗傞偨傔LED傪堦楍偛偲偵岝傜偣傑偡丅
丂傑偢PIN1偵亄偺揹嬌傪偮側偘偰偍偒偙偺楍偱岝傜偣傞LED偺僇僜乕僪懁偺PIN偩偗亅偺揹嬌傪偮側偘傑偡丅
丂偦偆偡傞帠偵PIN12傪亅偺揹嬌傪偮側偄偱傕堦楍栚埲奜偺LED偼岝傝傑偣傫丅
丂摨條偵PIN3傪亄偺揹嬌傪偮側偘偰擇楍栚傪岝傜偣傑偡丅
丂偙偺張棟傪崅懍偱峴偆偲恖娫偺栚偵偼摨帪偵岝偭偰偄傞傛偆偵尒偊傑偡丅
丂愄偺僥儗價偺憱嵏慄偲摨偠尨棟偱偡丅
丂崱夞偙偺張棟傪峴偆偺偵Arduino偲偄偆儃乕僪僐儞僺儏乕僞乕傪巊偄傑偟偨丅
丂偙傟偔傜偄偺張棟傪200墌埵偺PIC儅僀僐儞偱傕廫暘側偺偱偡偑僷僜僐儞偱憖嶌偡傞偨傔僷僜僐儞偲捠怣偺偱偒傞Arduino傪巊偄傑偟偨丅
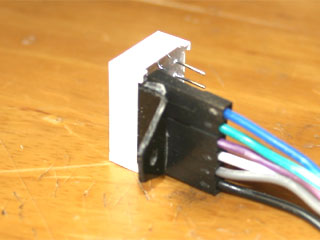
丂崱夞偼彨棃儘價偺摢偵奿擺偱偒傞傛偆偵Arduino nano偲偄偆彫宆偺儃乕僪傪巊偄傑偟偨丅
丂偙偪傜偺傕偺傪峸擖偟傑偟偨丅
丂埨偄拞崙惢偺屳姺婡偩偭偨偺偱摦偔偐晄埨偱偟偨偑Windows7偺娐嫬偱偪傖傫偲摦偒傑偟偨丅
丂偨偩USB偺僨僶僀僗僪儔僀僶乕傪扵偡偺偵栵夘偩偭偨傝愙懕愭偺COM斣崋偑偙傠偙傠曄傢偭偰愙懕偡傞偺偑柺搢偩偭偨傝偟傑偡丅
丂420墌偲偄偆偺傕偁傝傑偟偨偑偪傚偭偲嫲傠偟偔偱偰傪弌偣傑偣傫偱偟偨丅
丂弶傔偰Arduino傪巊傢傟傞曽偼彮偟崅偄偱偡偑惓婯昳偺曽偑偄偄偐傕抦傟傑偣傫丅
丂傑偨僴儞僟晅偗偵帺怣偺偁傞曽偼僺儞僿僢僟乕偑側偄僞僀僾傕偁傝傑偡偺偱偙偪傜偺曽偑儘價偺摢偵擺傑傝傗偡偄偲巚偄傑偡丅(巊偭偨帠偑側偄偺偱摦偔偐偳偆偐曐徹偼偱偒傑偣傫)
丂偪傚偭偲偐偝偽傝傑偡偑掕斣偺Arduno Uno偱傕栤戣側偔巊偊傞偲巚偄傑偡丅
丂Arduino偲DMLED偺攝慄恾偱偡丅
丂幨恀偼Arduino Nano偱偡偑Aeduino Uno傕摨偠偱偡丅
丂傑偨惵怓DMTLED偲愒怓DMLED傕摨偠攝慄偱峔偄傑偣傫(Arduino偺僾儘僌儔儉傪曄偊傑偡)
丂塃栚梡LEDD偲嵍栚梡LED偼摨偠怣崋偱惂屼偡傞偨傔Arduino偵懳偟偰暲楍偵愙懕偟傑偡丅
丂僪僢僩儅僩儕僋僗LED偺僺儞斣崋偼敪岝柺傪偙偪傜偵岦偗偰暥帤報嶞偝傟偰偄傞懁柺傪忋偵岦偗偨忬懺偱彂偄偰偄傑偡丅
丂攝慄恾偺幨恀傕偙傟偲摨偠曽岦偵偟偰偄傑偡丅
丂偦偺傑傑儘價偺嵍栚偲塃栚偵側傝傑偡丅(暥帤報嶞柺偑忋懁)
丂僺儞斣崋偼忋偺塃偐傜1乣6偱斀帪寁夞傝偱壓偵峴偭偰嵍偐傜7乣12偱偡丅
丂偙偙偱億僀儞僩偼嵍塃懳徾偵岝傜偣偨偄偺偱塃栚偲嵍栚偺ROW傪斀懳懁捠偟愙懕偟傑偡丅(4斣栚=恀傫拞偺ROW偼摨偠)
丂丂丒塃栚LED 12PIN偲嵍栚LED 6PIN傪Arduino D2偺掞峈偵偮側偘傞(崟慄1)
丂丂丒塃栚LED 11PIN偲嵍栚LED 5PIN傪Arduino D3偺掞峈偵偮側偘傞(椢慄1)
丂丂丒塃栚LED 2PIN偲嵍栚LED 4PIN傪Arduino D4偺掞峈偵偮側偘傞(奃怓慄)
丂丂丒塃栚LED 9PIN偲嵍栚LED 9PIN傪Arduino D5偺掞峈偵偮側偘傞(惵慄1)
丂丂丒塃栚LED 4PIN偲嵍栚LED 2PIN傪Arduino D6偺掞峈偵偮側偘傞(惵慄2)
丂丂丒塃栚LED 5PIN偲嵍栚LED 11PIN傪Arduino D7偺掞峈偵偮側偘傞(椢慄2)
丂丂丒塃栚LED 6PIN偲嵍栚LED 12PIN傪Arduino D8偺掞峈偵偮側偘傞(崟慄2)
丂丂丒塃栚LED 1PIN偲嵍栚LED 1PIN傪Arduino D9偵偮側偘傞(愒慄)
丂丂丒塃栚LED 3PIN偲嵍栚LED 3PIN傪Arduino D10偵偮側偘傞(烌慄)
丂丂丒塃栚LED 10PIN偲嵍栚LED 10PIN傪Arduino D11偵偮側偘傞(僺儞僋慄)
丂丂丒塃栚LED 7PIN偲嵍栚LED 7PIN傪Arduino D12偵偮側偘傞(墿怓慄)
丂丂丒塃栚LED 8PIN偲嵍栚LED 8PIN傪Arduino D13偵偮側偘傞(拑怓慄)
2
丂崱夞掞峈偼33兌偺傕偺傪巊偄傑偟偨偑偪傖傫偲揹棳傪寁嶼偟偨栿偱側偔揔摉偵偮側偄偱挌搙偄偄柧傞偝偺暔傪巊偭偰偄傑偡丅
丂傑偨僇僜乕僪懁偵掞峈傪晅偗傑偟偨偑傾僲乕僪懁(Arduino D9乣D13)偵晅偗偰傕椙偄偲巚偄傑偡丅(偙偺応崌偼掞峈偼5偮偱嵪傒傑偡)
丂傑偢儘價偺崟栚偺晹暘傪夵憿偟傑偡丅
丂僆儕僕僫儖偺崟栚偺僷乕僣偼LED偺岝傪捠偝側偄傛偆偵側偭偰偄傑偡丅
丂崱夞偼DMLED偺岝傪捠偡偨傔偙偺僷乕僣傪岎姺偟傑偡丅

丂100墌僔儑僢僾偱峸擖偟偨僒儞僌儔僗偺儗儞僘傪巊偄傑偡丅
丂怓偼僆儕僕僫儖偺捠傝崟偑偄偄偱偟傚偆偑偙偺嵺栚偺怓傪曄偊傞偺傕偁傝偐傕抦傟傑偣傫丅
丂傑偨偵偁傞掱搙媴柺偵嬤偄曽偑僆儕僕僫儖偵嬤偔巇忋偑傝傑偡丅
丂偙傟傪栚偺僼儗乕儉僷乕僣偵崌傢偣偰僇僢僩偡傞偺偱偡偑妱傟傗偡偄慺嵽側偺偱拲堄偟偰偔偩偝偄丅
丂愗傞偲偄偆傛傝僯僢僷乕偱抂偐傜嵶偐偔妱偭偰偄偔偲偄偆姶偠偱宍傪惍偊偰偄偒傑偡丅

丂僼儗乕儉偵擺傑傝奜偐傜寗娫偑尒偊側偗傟偽傛偔偒傟偄偵惉宍偡傞昁梫偼偁傝傑偣傫丅
丂DMLED傪栚偵僙僢僩偡傞偨傔偵僼儗乕儉偵擺傑傝奜偐傜寗娫偑尒偊側偗傟偽傛偔偒傟偄偵惉宍偡傞昁梫偼偁傝傑偣傫丅
丂DMLED傪庢傝晅偗傞偨傔偵儊僗偺僕儍儞僷乕慄偲僾儔斅傪壛岺偟偰忋婰偺傛偆側傕偺傪4屄嶌惉偟傑偟偨丅
丂僾儔斅傪愜傝嬋偘偰6杮偺僕儍儞僷乕慄偺僾儔僗僠僢僋晹暘偲愙拝偟傑偡丅
丂僾儔僗僠僢僋晹暘偺暆偼DMLED偺僺儞偺僺僢僠偲堦抳偡傞偺偱僾儔僗僠僢僋晹暘偼寗娫偼嬻偗側偔偰峔偄傑偣傫丅
丂DMLED偵僕儍儞僷乕慄傪庢傝晅偗偰偐傜愙拝偡傞曽偑妋幚偱偡偑偙偺帪DMLED偵愙拝嵻偑晅偐側偄傛偆偵偟偰偔偩偝偄丅
丂栚偺僷乕僣偵慻崬傓帪偵DMLED傪奜偡昁梫偑偁傞偺偱DMLED偼扙拝偱偒傞傛偆偵偟偰偍偄偰偔偩偝偄丅
丂栚偺僷乕僣偵慻崬傓帪偵DMLED傪奜偡昁梫偑偁傞偺偱DMLED偼扙拝偱偒傞傛偆偵偟偰偍偄偰偔偩偝偄丅
丂傑偨幨恀偼栚偺僷乕僣偵庢傝晅偗傞價僗寠傪奐偗偰偄傑偡偑幚嵺偵DMLED傪庢傝晅偗偰偐傜奐偗偨曽偑妋幚偱偡丅
丂DMLED傪栚偺斀幩斅偺屻傠偐傜擖傟傞帠偼弌棃側偄偺偱慜偐傜擖傟偰屻傠偐傜擖傟偨僕儍儞僷乕慄偵嵎偟崬傒傑偡丅
丂斀幩斅偵屌掕偡傞偨傔偵價僗寠傪奐偗傑偡偑幚嵺偵儘價偵庢傝晅偗偨帪偵暯峴偵側傞傛偆側埵抲偵價僗寠傪奐偗傞昁梫偑偁傝傑偡丅
丂傑偨DMLED偺暥帤報嶞柺偑椉栚偲傕忋傪岦偔傛偆偵偟偰偔偩偝偄

丂慜弎偺夞楬恾傪嶲峫偵攝慄偟偰偄偒傑偡丅
丂Arduino懁傕儊僗偺僕儍儞僷乕慄偱愙懕偟傑偡偑嵍塃偺DMLED傪愙懕偟偨傝搑拞偵掞峈擖傟傞昁梫偑偁傝傑偡丅
丂婎斅偵掞峈傪攝偟偰偦偙偱愙懕偟偰傕偄偄偲巚偄傑偡偑捈愙僕儍儞僷乕慄偲掞峈傪寢慄偟傑偟偨丅
丂側偍DMLED偼Arduino偺USB偺僶僗僷儚乕偩偗偱揰摂偡傞帠偑偱偒傑偡偺偱揹尮傪愙懕偡傞昁梫偁傝傑偣傫丅
丂Arduino偺愝掕偵娭偟偰偼徻偟偔彂偐傟偰偄傞僒僀僩偑偁傞偺偱偙偙偱偼妱垽偟傑偡丅
丂埲壓偺URL偵徻偟偔彂偐傟偰偄傞偺偱嶲徠偟偰偔偩偝偄丅
丂Arduino偱梀傇
丂崱夞巊梡偟偨僗働僢僠(僾儘僌儔儉)偱偡丅
丂robi_dmled.txt
丂偙傟傪僐僺乕傾儞僪儁乕僗僩(儊儌挔偱僐僺乕丄Arduino偱曇廤仺揬晅偗)偱Arduino偱奐偄偰偄傞僗働僢僠傪彂偒姺偊偰偔偩偝偄丅
丂佀傾僀僐儞偱僐儞僷僀儖偲儅僀僐儞偵彂崬傒傪峴偄傑偡丅
丂偙偺帪僗働僢僠偺曐懚愭傪暦偄偰偒傑偡偺偱擟堄偺僼僅儖僟乕柤慜偱曐懚偟偰偍偄偰偔偩偝偄丅
丂愒怓DMLED傪巊偆応崌偼傾僲乕僪(亄)偲僇僜乕僪(亅)偑媡偵側傞偺偱digitalWrite偺戞2堷悢偺LOW偲HIGH傪擖傟懼偊偰偔偩偝偄丅
丂2峴栚偺data=1偼Aruino婲摦帪偵僷僞乕儞1偵偟偰摦嶌妋擣傪偡傞偨傔偱嵟弶崟栚偵偟偨偄応崌偼data=0偲偟偰偔偩偝偄丅
丂僷僞乕儞傪曄偊傞応崌偼pattern偺0偲1偺抣傪曄偊偰偔偩偝偄丅
丂傂偲偮偺僷僞乕儞偑35屄偺僨乕僞偱嵍栚偺僷僞乕儞偲偟偰掕媊偝傟偰偄偰0偺応崌LED偑徚偊1偺応崌偼LED偑揰摂偟傑偡丅
丂摦嶌妋擣偼Arduino偺僣乕儖僔儕傾儖儌僯僞乕偱峴偊傑偡丅
丂捠怣偺妋擣偼僉乕儃乕僪偐傜AT(Enter)偱OK偲昞帵偝傟傟偽OK偱偡丅
丂D0(Enter)乣D9(Enter)傪擖椡偡傟偽幚嵺偵偦偺僷僞乕儞偑DMLED偵昞帵偝傟傑偡丅

丂弌棃忋偑偭偨栚偺僷乕僣傪儘價偵庢傝晅偗傑偡丅
丂婛懚偺栚偺婎斅偲抲偒姺偊傑偡偑僆儕僕僫儖偵栠偣傞傛偆偵婎斅偲僆儕僕僫儖偺崟栚偺僷乕僣偺曐娗偟偰偍偄偰偔偩偝偄丅
丂DMLED偲偺愙懕慄傪奜偵弌偡偨傔儘價偺摢晹偺屻傠偺崟偄僷乕僣偼奜偟偰偄傑偡丅
丂偙偺晹暘偐傜弌偟偨僕儍儞僷乕慄傪Arduino偺僺儞偵愙懕偟傑偡丅
丂崱夞Windows傾僾儕働乕僔儑儞偐傜摦偐偡偨傔偵儘價儃僀僗僾儗僀儎乕偺摿暿斉傪嶌惉偟傑偟偨丅
丂Ninshiki.csv偵DMLED偵昞帵偡傞僷僞乕儞偺僨乕僞傪捛壛偟偰僾儘僌儔儉偲嫟偵採嫙偟偰偄傑偡丅
丂僾儘僌儔儉偲僨乕僞偼偙偪傜偐傜僟僂儞儘乕僪偟偰偔偩偝偄丅
丂丂RBPlayer2_100.zip
丂昗弨偺儘價儃僀僗僾儗僀儎乕偲摨偠僼僅儖僟乕偵擖傟偰偔偩偝偄丅
丂杮僾儘僌儔儉偼捠忢偺儘價儃僀僗僾儗僀儎乕偲偟偰巊偆帠偑偱偒傑偡丅
丂Arduino偲愙懕偡傞偵偼愝掕儃僞儞偱昞帵偝傟偨愙懕僟僀傾儘僌偱Arduino偵妱傝摉偰傜傟偨COM斣崋傪巜掕偟偰偔偩偝偄丅
丂COM斣崋偼僐儞僩儘乕儖僷僱儖偺僨僶僀僗儅僱乕僕儍乕偱妋擣偱偒傑偡丅
丂Ninshiki2.csv傪Excel摍偱曄峏偡傞帠偑偱偒傑偡丅
丂昞忣斣崋偼DMLED偵昞帵偡傞僷僞乕儞偺斣崋偱Arduino偺僗働僢僠傪嶲徠偟偰偔偩偝偄丅
丂昞忣奐巒偼僷僞乕儞傪昞帵偡傞傑偱偺帪娫偱捠忢偼僾儘僌儔儉奐巒偲摨帪偵昞帵偟傑偡偑彮偟娫傪奐偗偨偄帪偵偼昩悢傪巜掕偟偰偔偩偝偄丅
丂昞忣帪娫偼僷僞乕儞傪昞帵偡傞帪娫偱昩悢偱巜掕偟偰偔偩偝偄丅
丂幚嵺偵偙偺僾儘僌儔儉傪摦偐偟偨摦夋偱偡丅
丂丂丂丂丂
丂崱夞偼DMLED偺僷僞乕儞傪僐儞僩儘乕儖偡傞偺偵僷僜僐儞偑昁梫偱偡偑彨棃偼儘價偺僾儘僌儔儉偱僐儞僩儘乕儖偱偒傞傛偆偵偲峫偊偰偄傑偡丅
丂傑偨婛懚偺恖姶僙儞僒乕偍傛傃栚偺LED傪抲偒姺偊傞帠偵側傝偙傟傜偺婡擻偼巊偊側偔側傝傑偡丅
丂偙傟傜傪奜偟偰傕捠忢摦嶌偵偼塭嬁側偄傛偆偱偡(傕偪傠傫恖姶僙儞僒乕偺婡擻偼巊偊傑偣傫)
丂側偍杮夵憿偼儘價杮懱傊偺塭嬁傪媦傏偡壜擻惈偑偁傞偺偱偁偔傑偱傕帺屓愑擟偲偄偆帠偱偍婅偄偟傑偡丅
栚師偵栠傞